Design, Build, Test - Drone Payload Transfer System
Hi! We are Team 149, Andrew, Faizaan, Harry, Jack and Niall. We would like to welcome you to our
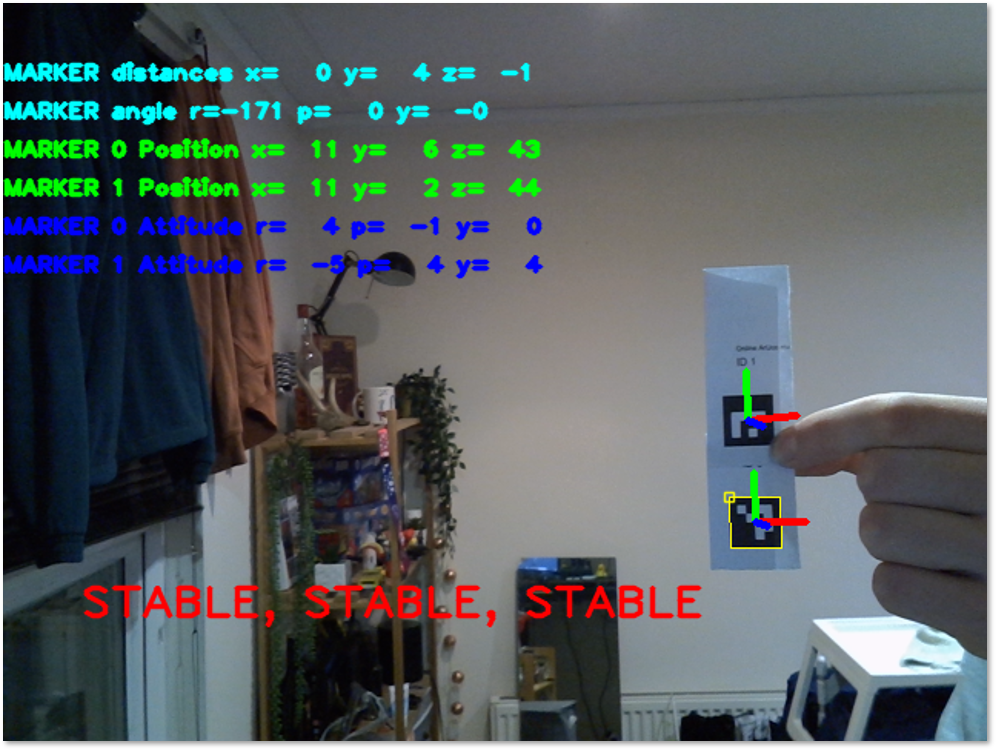
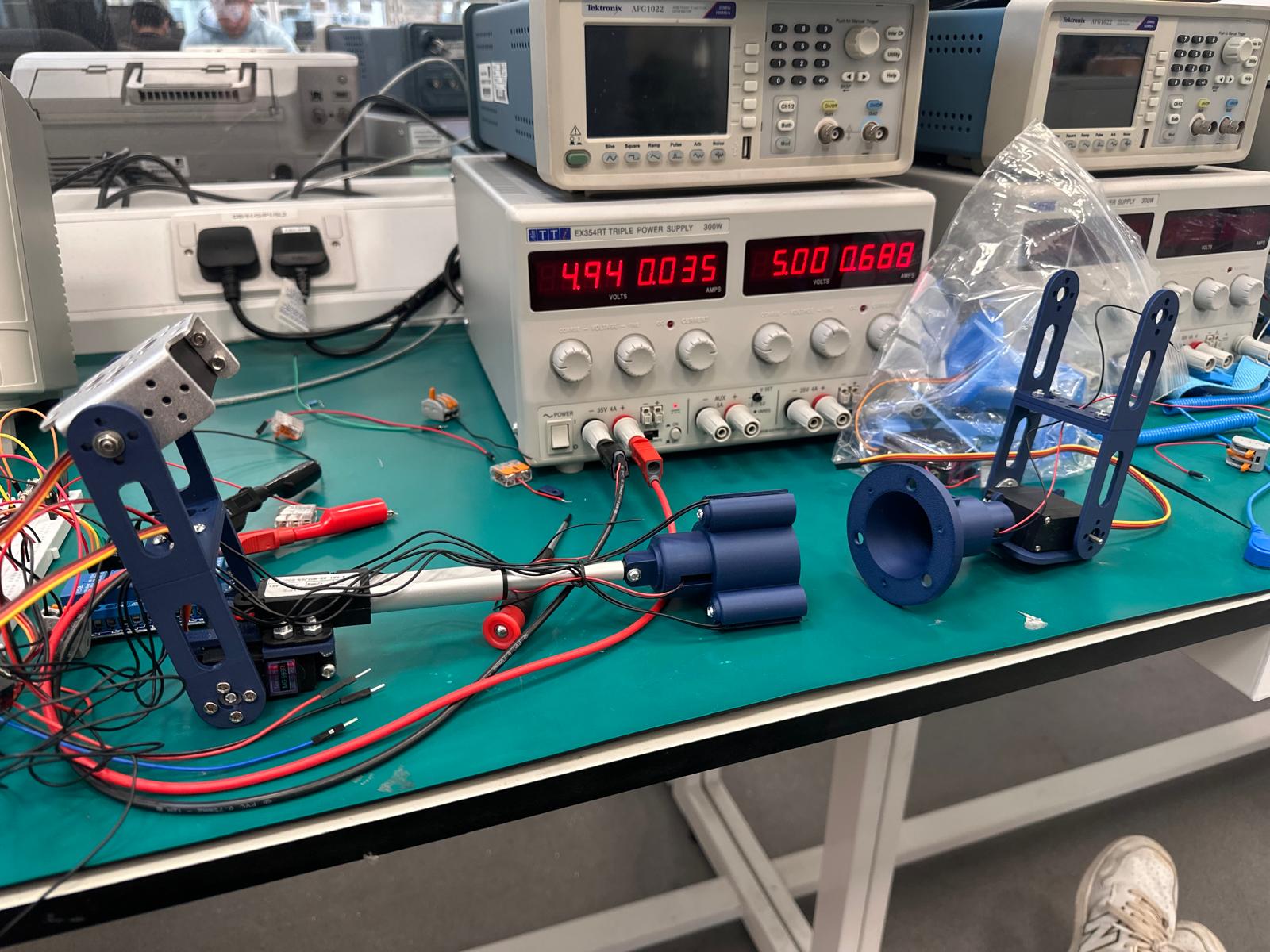
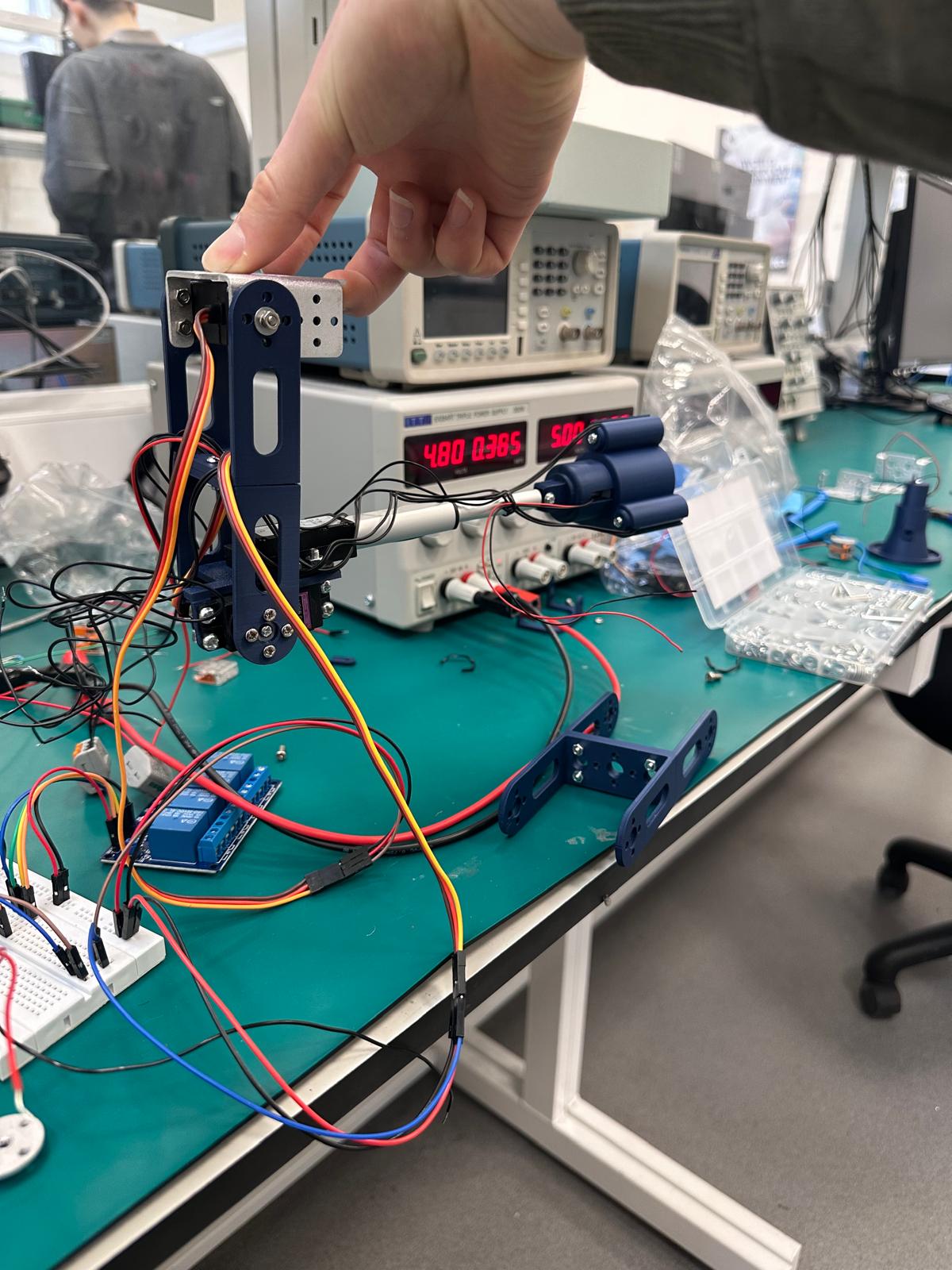
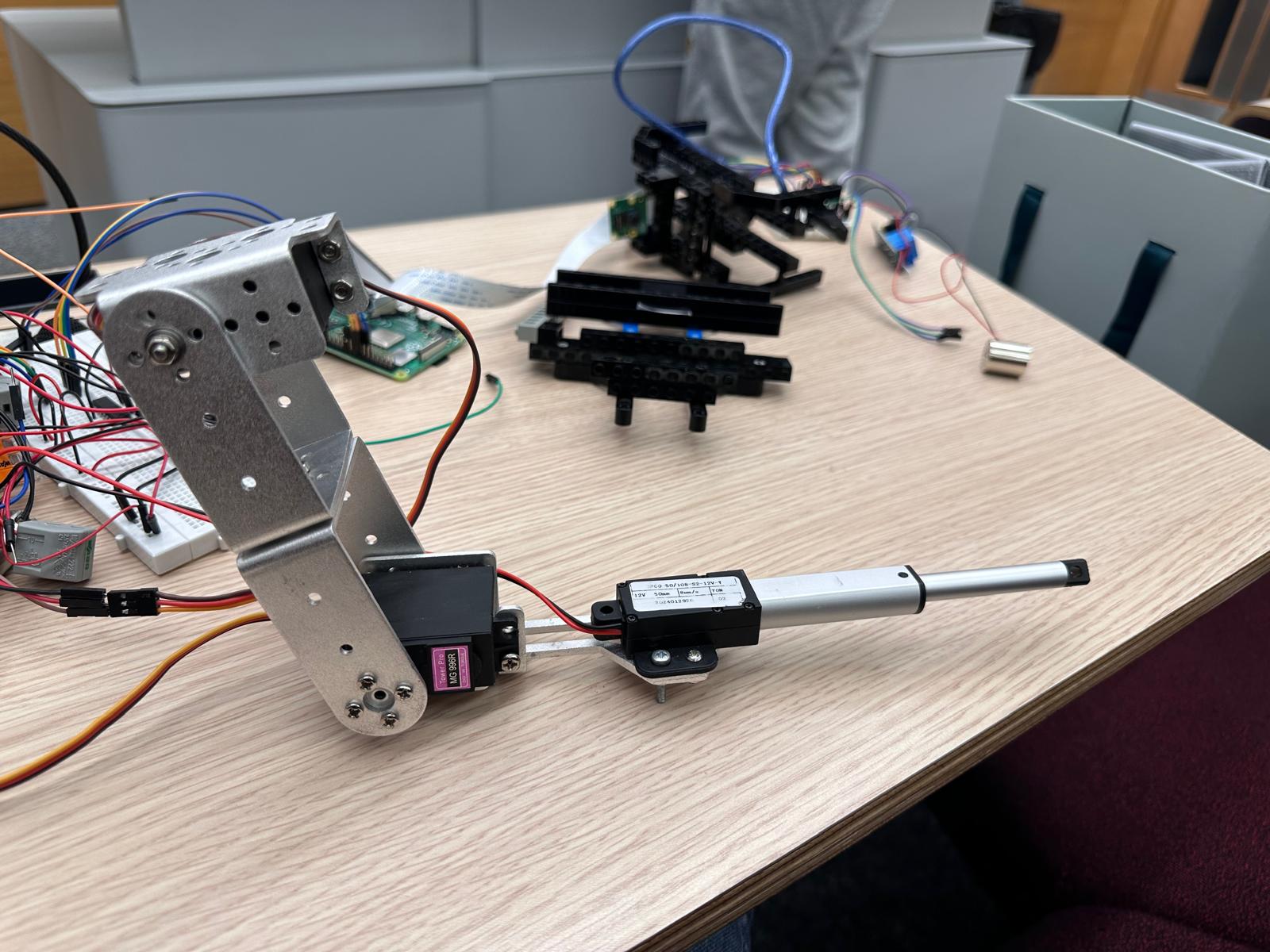
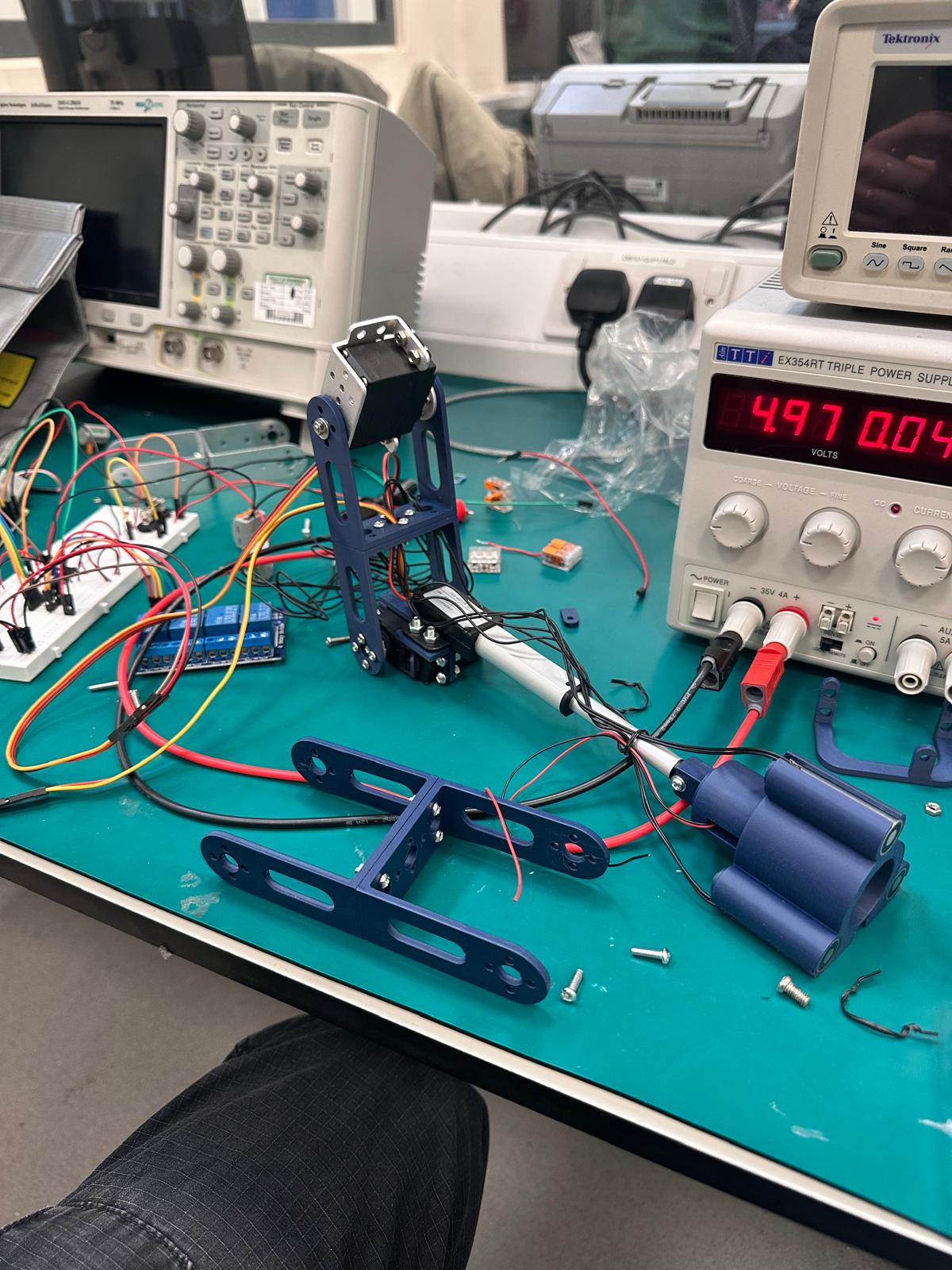
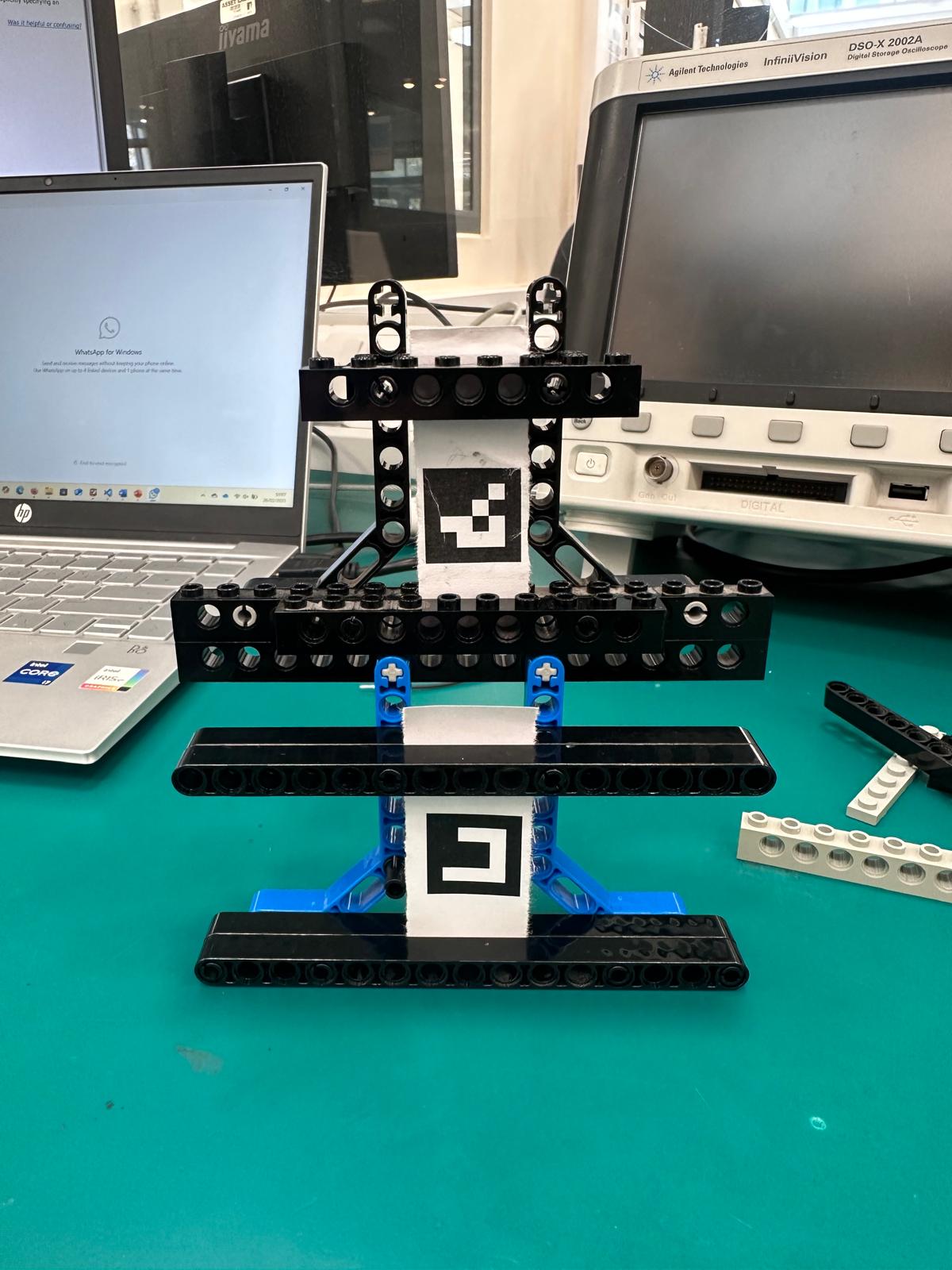
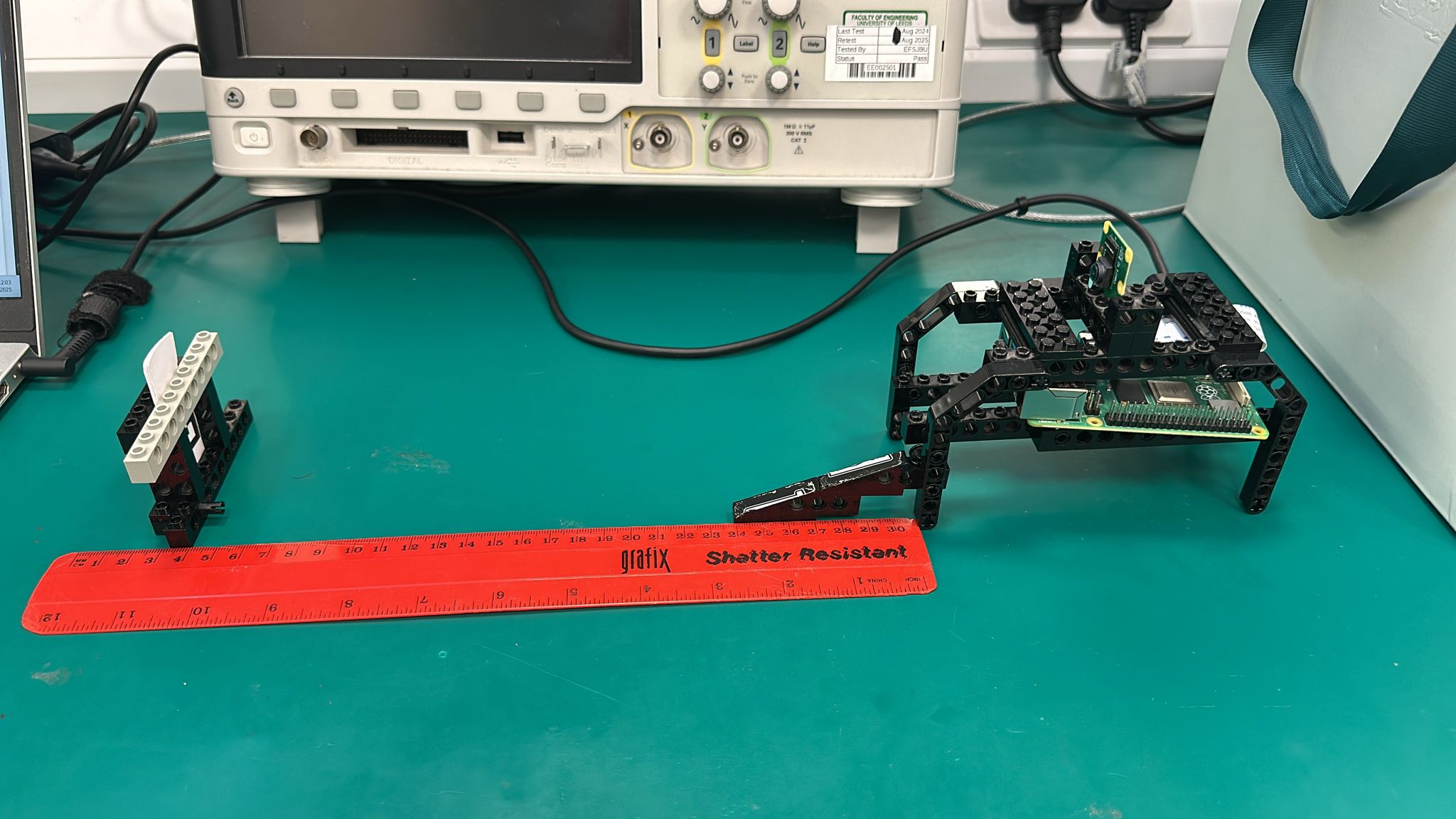
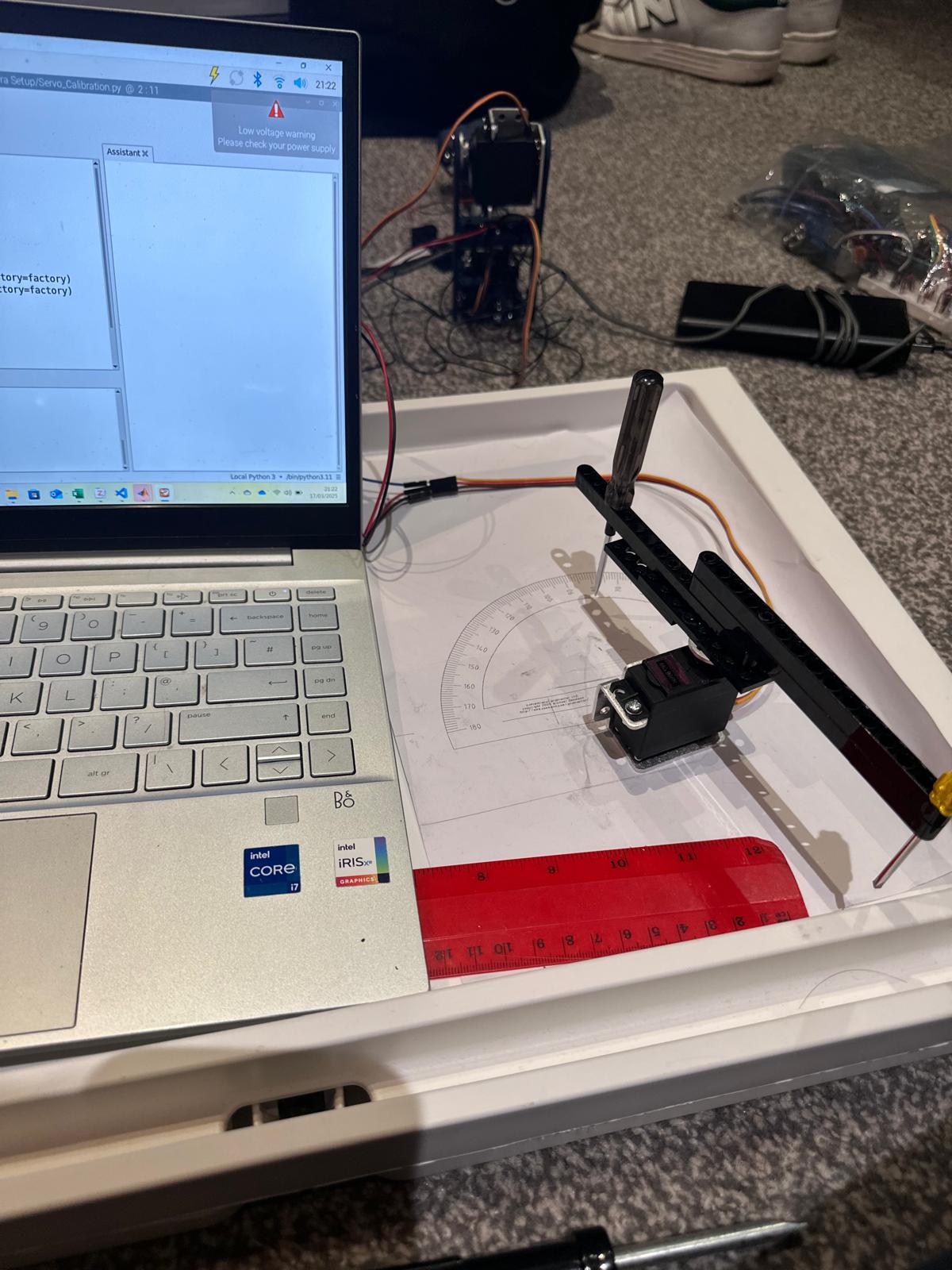
website designed for our project! On the right you can see a video of our early arm workings for
this project.
Please keep scrolling to find out more about the project and get an
understanding of its workings.